Oggi vogliamo dare un'occhiata più da vicino al modello di produzione servo. In senso stretto, si tratta di un servo drive e non di un servomotore poiché il controller è già incluso. Tuttavia, hanno poco a che fare con le pulsari che conosciamo dal settore. Abbiamo MG995, MG996R E SG90 (informazioni in stato dinella nostra gamma di prodotti. Le SG90 (informazioni in stato di è il più piccolo dei nostri servo, questo è più piccolo e leggero del MG995/6R ed è utilizzato principalmente in aerei da modella o navi da modella. Con un peso di soli 9 grammi e una coppia massima fino a 1,6 kg/cm, questo servo è particolarmente adatto dove un peso leggero è importante, ma i grandi carichi non possono essere spostati con esso.
Significativamente più grande e robusto con una coppia massima di 9 kg/cm, MG995. Tuttavia, a differenza MG996Rsolo un cambio di plastica, ma la velocità di regolazione è leggermente superiore. Ciò è particolarmente evidente nella vita utile sotto carico. La coppia del MG996R è stato aumentato a circa 11 kg/cm. Aperto MG996R:

Nello standard per i servomotori industriali, i servomotori con modulazione della larghezza dell'impulso sono controllati:

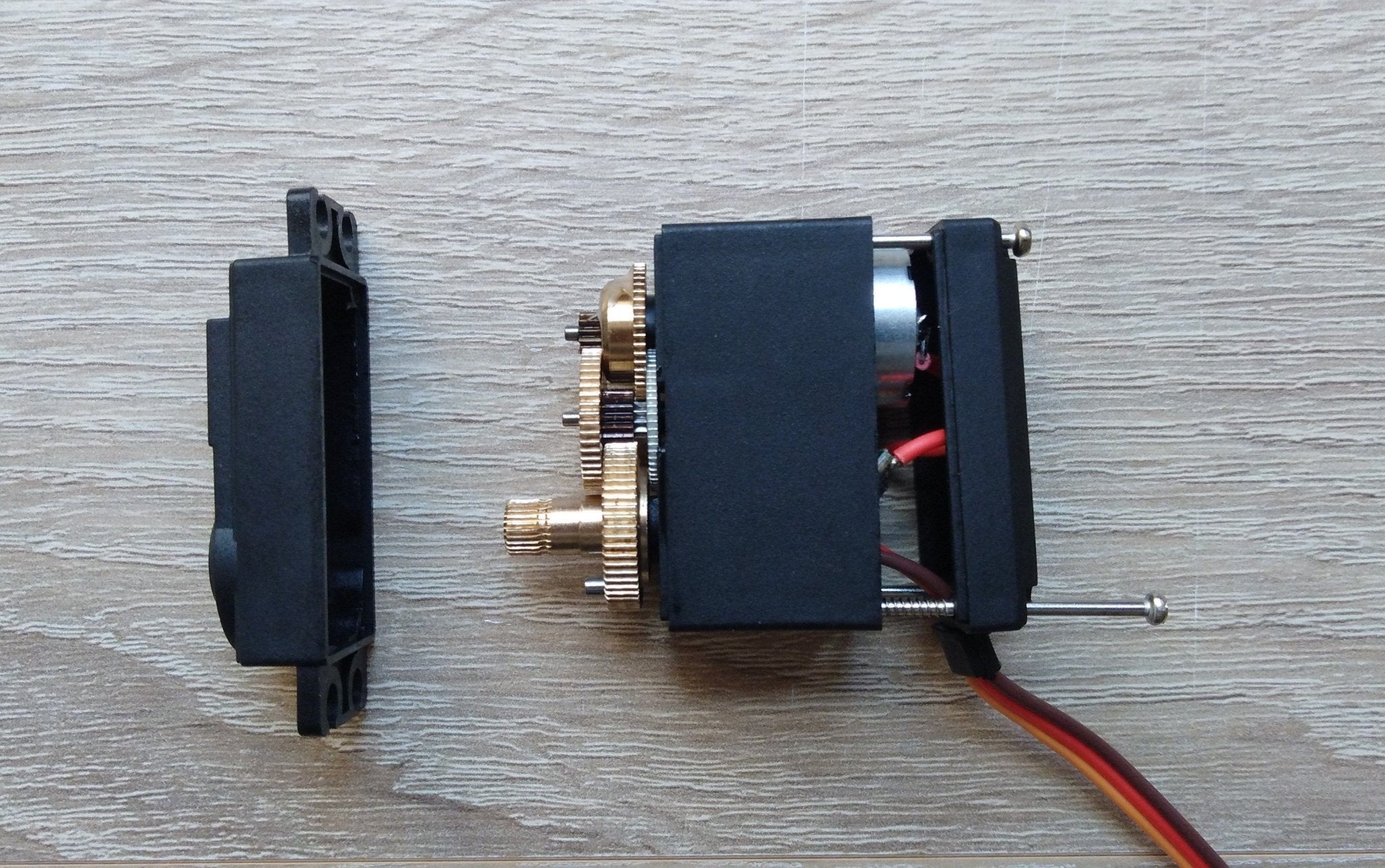
La larghezza degli impulsi controlla l'angolo in cui deve essere posizionato il braccio servo. Un segnale di 50 Hz (20 ms di lunghezza periodo) è comune, che è tra 500 microsecondi (arresto sinistro, 0 gradi) e 2500 microsecondi (arresto destro, 180 gradi) ad alto livello e il resto della lunghezza del periodo a basso livello. Tuttavia, molti servo non hanno sfruttato appieno la loro libertà di movimento in questa gamma di valori e/o possono muoversi tra altri angoli. Per aumentare la gamma di movimento, è possibile "incidere" il servo. Il limite meccanico nel cambio viene rimosso (il piccolo perno sulla marcia all'estrema destra):

Per il controllo della posizione, c'è un potenziametro nel servometro, che è collegato all'albero di uscita. Utilizzando questo potenziametro, il servoelettronico determina l'angolo effettivo dell'albero di uscita (da riconoscere al centro dell'immagine).

Questo viene confrontato con l'angolo di destinazione determinato dal segnale PWM. In caso di deviazione tra l'angolo effettivo e l'angolo di destinazione, l'elettronica controlla l'angolo dell'albero di uscita tramite il motore e il cambio. Uno svantaggio dei servoing di ingegno del modello è che non è possibile eseguire una query se il servo è sovraccarico. Di conseguenza, non è possibile determinare se il servo è anche in grado di avviare la posizione desiderata. Alcuni servodigitali digitali risolvono questo problema, ma questo è un altro articolo
Fino alla prossima volta :)










4 commenti
Shakil
Like!! Really appreciate you sharing this blog post. Really thank you! Keep writing.
Willi
Wie hoch ist eigentlich die Zyklenfestigkeit der Servos bei 75% der max Last?
robby
DAS nicht der Drehmoment wird in Nm oder Ncm oder auch noch daNcm angegeben und nicht in kg/cm. Die angreifende Kraft wird wird mit der Länge des Hebelarms multipliziert und nicht durch diese dividiert. Das heißt, dass bei einem Drehmonent von 120Ncm in einer Entfernung von 10cm von der Drehachse am Hebelarm noch eine Kraft von 12N ausgeübt werden kann. Von einer Kraft ohne die Angabe der Hebelarmlänge zu sprechen ist schlicht Unsinn.
Maclaine
Ich finde es klasse das Ihr bei dem Servo den Drehmoment angebt und nicht wie beim Chinamann üblich die Haltekraft.
Dies ist die Kraft die man aufbringen muss um den Widerstand des Getriebes zu überwinden, sprich bis man den Servohebel drehen kann. Da stehen dann so Traumwerte wie 25 Kg.
Üblicherweise gibt man bei geeigneten Servos auch die Stellkraft bei zulässigen Voltzahlen an. 4,8 V ist ein Wert noch aus der Zeit von NC- Akkus.
Heute werden 6,0 Volt und 7,4 Volt angegeben ( Wert 2er Lipozellen).
Bei sogenannten Hochvoltservos , Kennzeichen HV, sogar bis 8,4 Volt.