Hoy queremos echar un vistazo más de cerca a la modelo haciendo servos. Estrictamente hablando, se trata de un servomotor y no un servomotor ya que el controlador ya está incluido. Sin embargo, tienen poco que ver con servomotores que conocemos de la industria. Tenemos MG995, MG996R Y SG90en nuestra gama de productos. el SG90 es el más pequeño de nuestros servos, este es más pequeño y ligero que el MG995/6R y se utiliza principalmente en aviones de fabricación de modelos o barcos de fabricación de modelos. Con un peso de sólo 9 gramos y un par máximo de hasta 1,6 kg/cm, este servo es especialmente adecuado cuando un peso ligero es importante, pero las cargas grandes no se pueden mover con él.
Significativamente más grande y más robusto con un par máximo de 9kg/cm, el MG995. Sin embargo, en contraste con la MG996Rsólo una caja de cambios de plástico, pero la velocidad de ajuste es ligeramente superior. Esto es particularmente notable en la vida útil bajo carga. El par de la MG996R también se ha aumentado a aprox. 11kg/cm. Abierto MG996R:

En el estándar para servomotores industriales, se controlan los servos de fabricación de modelos con modulación de ancho de pulso:

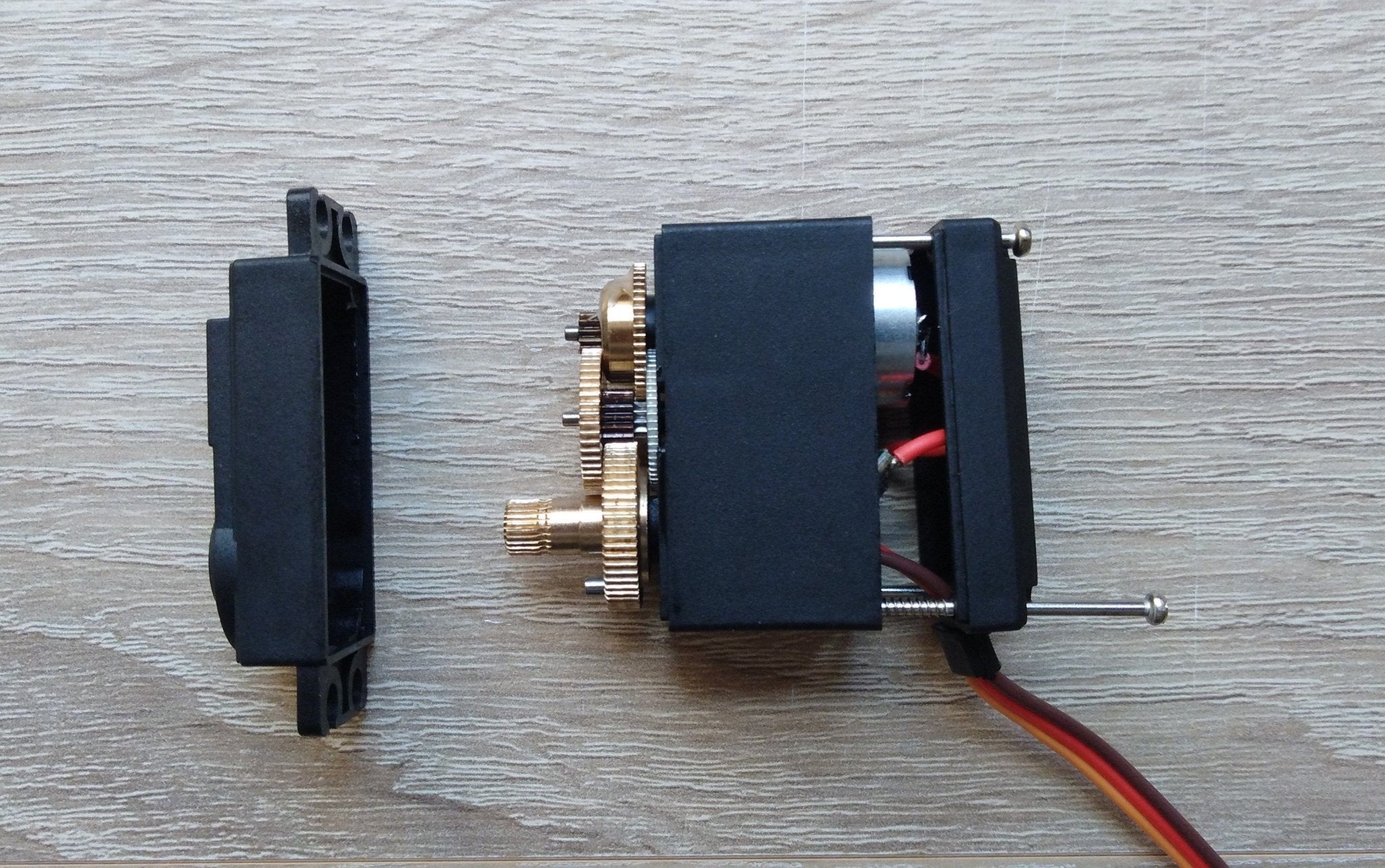
La anchura de los pulsos controla el ángulo al que se va a colocar el brazo servo. Una señal de 50 Hz (20 ms de longitud del período) es común, que está entre 500 microsegundos (parada izquierda, 0 grados) y 2500 microsegundos (parada derecha, 180 grados) a alto nivel y el resto de la longitud del período en el nivel bajo. Sin embargo, muchos servos no han aprovechado al máximo su libertad de movimiento en este rango de valores y / o pueden moverse entre otros ángulos. Para aumentar el rango de movimiento, es posible "hackear" el servo. Se elimina la limitación mecánica en la caja de cambios (el pequeño pasador en el engranaje en el extremo derecho):

Para el control de posición, hay un potenciómetro en el servo, que está conectado al eje de salida. Usando este potenciómetro, la servo electrónica determina el ángulo real del eje de salida (a reconocer en el centro de la imagen).

Esto se compara con el ángulo de destino determinado a partir de la señal PWM. En caso de desviación entre el ángulo real y el ángulo objetivo, la electrónica controla el ángulo del eje de salida a través del motor y la caja de cambios. Un inconveniente de los servos de ingenio modelo es que no es posible consultar si el servo está sobrecargado. Como resultado, no es posible determinar si el servo es incluso capaz de iniciar la posición deseada. Algunos servos digitales resuelven este problema, pero este es otro artículo
Hasta la próxima :)










4 comentarios
Shakil
Like!! Really appreciate you sharing this blog post. Really thank you! Keep writing.
Willi
Wie hoch ist eigentlich die Zyklenfestigkeit der Servos bei 75% der max Last?
robby
DAS nicht der Drehmoment wird in Nm oder Ncm oder auch noch daNcm angegeben und nicht in kg/cm. Die angreifende Kraft wird wird mit der Länge des Hebelarms multipliziert und nicht durch diese dividiert. Das heißt, dass bei einem Drehmonent von 120Ncm in einer Entfernung von 10cm von der Drehachse am Hebelarm noch eine Kraft von 12N ausgeübt werden kann. Von einer Kraft ohne die Angabe der Hebelarmlänge zu sprechen ist schlicht Unsinn.
Maclaine
Ich finde es klasse das Ihr bei dem Servo den Drehmoment angebt und nicht wie beim Chinamann üblich die Haltekraft.
Dies ist die Kraft die man aufbringen muss um den Widerstand des Getriebes zu überwinden, sprich bis man den Servohebel drehen kann. Da stehen dann so Traumwerte wie 25 Kg.
Üblicherweise gibt man bei geeigneten Servos auch die Stellkraft bei zulässigen Voltzahlen an. 4,8 V ist ein Wert noch aus der Zeit von NC- Akkus.
Heute werden 6,0 Volt und 7,4 Volt angegeben ( Wert 2er Lipozellen).
Bei sogenannten Hochvoltservos , Kennzeichen HV, sogar bis 8,4 Volt.